Our Noncontact Sensor Suit for Gait Environment Detection Published in IEEE TMECH
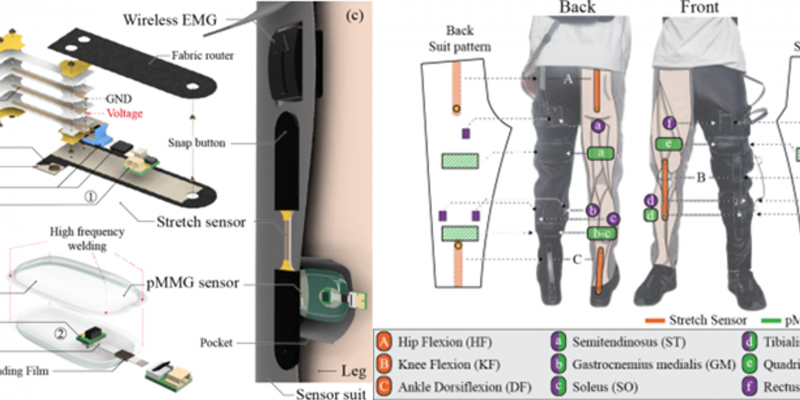
We are pleased to announce that our paper, “Development of a Sensor Suit for Gait Environment Detection Using Noncontact Sensors and […]

Mechanical Engineering, KAIST
We are pleased to announce that our paper, “Development of a Sensor Suit for Gait Environment Detection Using Noncontact Sensors and […]

We are excited to announce that our research team has published a paper titled “Field-programmable robotic folding sheet” in Nature […]

We are pleased to share that a review article titled “Using biopotential and bio-impedance for intuitive human–robot interaction” has been […]

We are delighted to share that two papers from our lab have been accepted to IROS 2025, one of the […]
We are pleased to announce that three papers from our laboratory have been accepted to ICRA 2025. One of the […]

We are pleased to announce that our paper, “Unsupervised Sim-to-Real Adaptation of Soft Robot Proprioception Using a Dual Cross-Modal Autoencoder” […]

We are pleased to announce that our paper, “Variable Transmission With Actively Controllable Reduction Ratio” has been published in the IEEE Transactions on […]

We are pleased to announce that our paper, “Development of a Sensor Suit for Gait Environment Detection Using Noncontact Sensors and […]

We are pleased to announce that our paper, “A Body-Scale Robotic Skin Using Distributed Multimodal Sensing Modules: Design, Evaluation, and Application” has […]

We are pleased to share that our paper, “A biomimetic elastomeric robot skin using electrical impedance and acoustic tomography for […]