
Pneumatic AFO Powered by a Miniature Custom Compressor for Drop Foot Correction
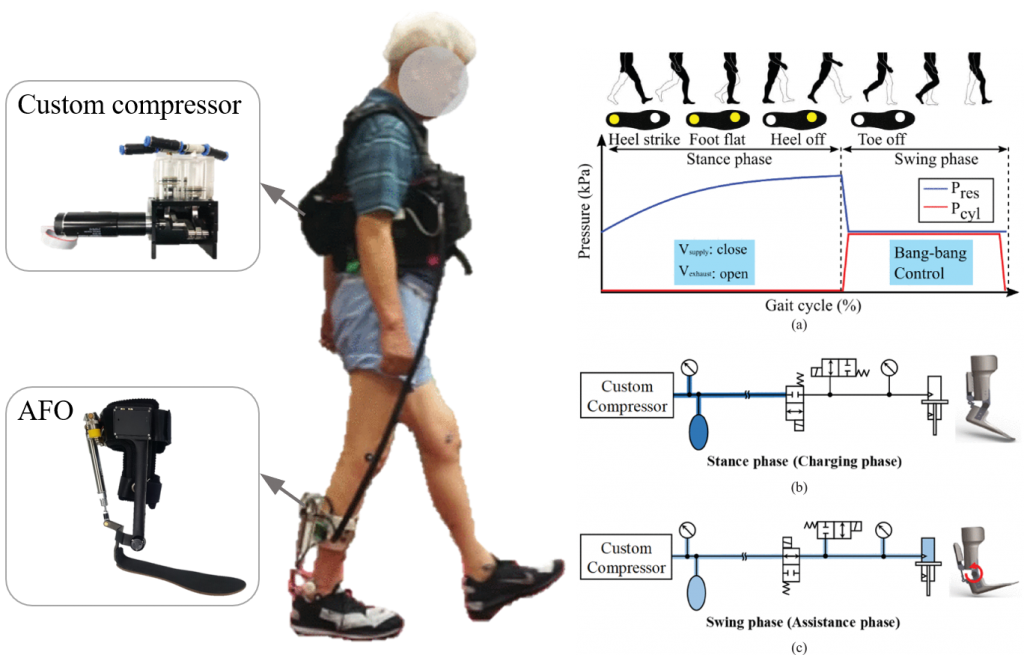
For active AFO applications, pneumatic remote transmission has advantages in minimizing the mass and complexity of the system due to the flexibility in placing pneumatic components and providing high back-drivability via simple valve control. However, pneumatic systems are generally tethered to large stationary air compressors, which greatly limit the practical daily usage. In this study, we implemented a wearable custom compressor that can be worn at the trunk of the body and can generate up to 1050 kPa of pressurized air to power an unilateral active AFO for dorsiflexion (DF) assistance of drop-foot patients. In order to minimize the size and weight of the custom compressor, the compression rate of the custom compressor was optimized to the rate of consumption required to power the active AFO. The finalized system can provide a maximum assistive torque of 9.8 Nm at a functional frequency of 1 Hz and the average resistive torque during free movement was 0.03 Nm. The system was tested for five hemiplegic drop-foot patients. The proposed system showed an average improvement of 12.3° of ankle peak dorsiflexion angle during the mid to late swing phase.
Related paper [2020 TNSRE]
Backdrivable and Fully-Portable Pneumatic Back Support Exoskeleton for Lifting Assistance
To reduce the possibility of lower back pain (LBP), which is the most frequent injury in manual labor, several back support exoskeletons have been developed and implemented for lifting motion assistance. Although pneumatic power transmission is attractive due to its inherent compliance and backdrivability, the portability of the pneumatic system is highly limited due to the bulky air compressors that provide compressed air to the system. Therefore, we aimed to develop a fully-portable pneumatic back support exoskeleton by integrating all pneumatic components in the system. The compressed air consumption and generation of pneumatic systems were modeled to meet design requirements. The developed exoskeleton was completely stand-alone and provided 80 Nm of maximum extension torque for 6 liftings per minute (6 l/m). The upper limit of the resistance torque was estimated to be about 2 Nm, which implies high backdrivability. Finally, lifting experiments were performed and surface electromyography (sEMG) was measured to validate the physical assistance of the developed exoskeleton system for ten subjects. Compared to the case with no exoskeleton, the back muscle activation was significantly reduced with the assistance.
Related paper [RA-L/ICRA 2020]