
Compact Flat Fabric Pneumatic Artificial Muscle (ffPAM) for Soft Wearable Robotic Devices
We developed a flat fabric pneumatic artificial muscle (ffPAM) for soft wearable robotic devices, achieving high compactness, rapid response, and low hysteresis error. The developed ffPAM exerts a maximum force of 118 N at 172 kPa, an average hysteresis of 6.2 %, and a response time of 0.032 s for contraction. Additionally the fabric-based soft capacitive contractile sensor was embedded for the closed-loop control. This paper was awarded on Best Paper Award in Service Robotics at the IEEE International Conference on Robotics and Automation 2021 (ICRA 2021) in recognition of its great potential to advance a wide range of applications in wearable service robots.
Related paper [RA-L/ICRA 2021]
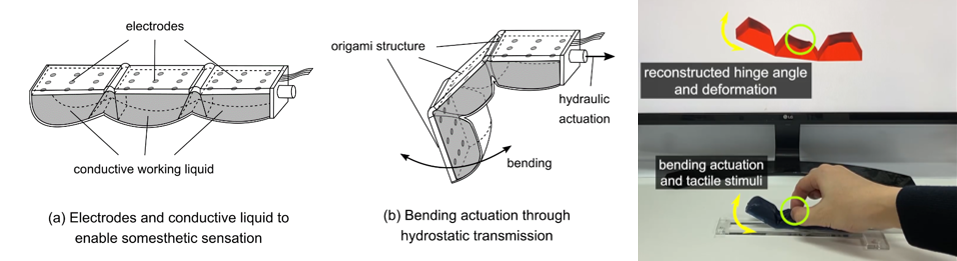


A soft somesthetic robotic finger based on conductive working liquid and an origami structure
- We developed a soft somesthetic robotic finger that can tactile, proprioceptive sensing, and bending actuation simultaneously.
- The internal conductive liquid of the soft robotic finger is utilized to realize the piezoresistive structures, while it is also used for hydrostatic transmission.
- We designed an origami structured soft robotic finger to generate bending actuation with the hydrostatic transmission of conductive working liquid.
- Meanwhile, we implemented tactile and proprioceptive sensing by estimating the shape of the conductive liquid using electrical resistance tomography(ERT).
- In this design, we could implement the sensor and actuator are not separated but deeply integrated into a simple structure.
Related paper [IROS 2021]

Development of Variable Stiffness Soft Robot Inspired by Musculoskeletal System of Echinoderms
An echinoderm can actively modulate the structural stiffness of its body wall by as much as 10 times, using the material and structural features that make up its body, including calcite ossicles, connective tissue and interossicular muscle. This capacity for variable stiffness makes it possible to adapt to the kinematics and dynamics required to perform a given task and the surrounding environment. This characteristic can improve the ability of soft material robots, which currently have limited application because of their low load-bearing capability. This paper presents a stiffness modulation method inspired by the connected ossicle structures of echinoderms. We introduce the mechanism, structure, and stiffness variation of the proposed design with respect to different ossicle shape, interval, and elastomer. Then we built a finger-shaped stiffening structure using the proposed design, measured its stiffness according to vacuum level, and showed its load-bearing capacity under control. The proposed design was then applied to a robotic gripper, a typical device that interacts with unpredictable environments and needs variable stiffening ability.
Related paper [ICRA 2019]